Friction is a ubiquitous physical phenomenon in nature and daily life. The demand for energy conservation and green development in industrial development has led to increasing attention being paid to tribology research. Despite significant achievements in tribology, many friction problems remain unsolved, particularly the lack of a unified friction theory applicable to all friction issues. The fundamental conditions for occurrence of friction are contact and relative motion between two surfaces, so the advancement of contact theories has significantly contributed to the development of tribology. Not only the models of contact theory across different scales in the past development of tribology were reviewed in this paper, also the assumptions and applicability limitations of each model were summarized and compared. The limitations of theoretical calculations of friction-contact research have been concerned. Now the study of contact mechanics and tribology is facing new opportunities for further progress under the era of the emergence of the big data and artificial intelligence based on sufficient data and computing power. The preliminary prospect on the research of tribology has been carried out. A novel research strategy that combines artificial intelligence, experimentation, and contact theory was proposed to investigate the contact problem in tribology field. This strategy may also be online collaborative research between different research groups all over the world.
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited.
Friction is an omnipresent phenomenon in human society and daily life, serving as a fundamental basis for human survival and development. Since ancient times, friction has played a crucial role in various activities, from early humans generating fire by rubbing wood to the transportation of massive stones for pyramid construction in ancient Egypt (see Figure 1). As civilization progressed, friction has been continuously re-examined and effectively utilized. Most people can intuitively recognize the significance of friction: without it, humans could not walk, vehicles could not move, airplanes could not take off, and objects could not be firmly grasped
[1]
Popov, V L. Contact Mechanics and Friction Physical Principles and Applications. Beijing: Tsinghua University Press; 2019, pp. 1-17.
[2]
Zheng Q, Ouyang W, Ma M, et al. Superlubricity: the world of ‘zero’ friction, Science & Technology Review. 2016, 34(5), 12-26.
. However, while friction can be a source of mechanical functionality, it is also a major contributor to energy dissipation. Statistics indicate that nearly one-third of the energy consumed in modern society is ultimately used to overcome various forms of friction, and approximately 80% of mechanical component failures are attributed to friction-induced wear
[3]
Holmberg K, Andersson P, Erdemir A.: Global energy consumption due to friction in passenger cars. Tribology International. 2012, 47, 221-234.
. Friction can be both beneficial and detrimental, underscoring the necessity of a deeper understanding and strategic application of tribological principles
[4]
Gnecco E, Meyer E. Elements of Friction Theory and Nanotribology [M]. Cambridge, UK: Cambridge University Press, 2015, pp. 1-41.
[4]
. By employing systematic and scientific design approaches, friction could be utilized more efficiently and sustainably, thereby enhancing performance and reducing energy loss.
. Tribology, as a scientific and technical discipline, investigates the principles governing the generation, variation, and evolution of interactions at interfaces in relative motion, along with their practical applications
[6]
Dowson, D. History of Tribology. London, Professional Engineering Publishing; 1998, pp. 7-16.
[6]
. As contact theories have advanced, our understanding of the fundamental mechanisms behind friction has been continuously refined. The strong couple between frictional behavior and contact mechanics highlights the crucial role of contact theory in deciphering friction mechanisms. The development of contact theories thus holds significant implications for the deeper exploration and application of tribology.
2. Classical Friction-Contact Research
2.1. Asperity Interlock Theory
The earliest quantitative study of friction dates back to 1493, when Leonardo da Vinci
[7]
Hutchings I M. Leonardo da Vinci's studies of friction. Wear. 2016, 360: 51-66.
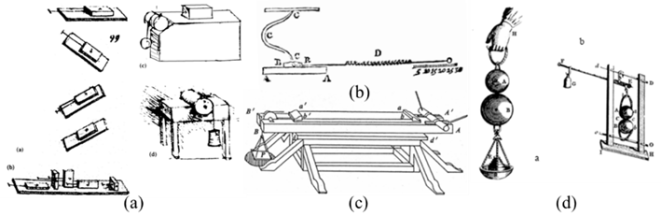
conducted friction experiments using a self-designed tribological apparatus (Figure 2(a)). He systematically measured friction forces on both horizontal and inclined surfaces and investigated the influence of contact area on friction. Additionally, he examined friction forces on horizontal planes using pulleys and analyzed frictional torques in rollers and half-bearings. Da Vinci proposed that the magnitude of friction varies with the material properties of objects, introducing the concept of the friction coefficient for the first time. Through extensive experiments, he formulated the fundamental principle that friction force is proportional to the normal load. Additionally, he noted that for objects of the same mass, friction is independent of the contact area.
The French scientist Amontons conducted extensive experiments using a self-designed friction apparatus (see Figure2(b)), further confirming da Vinci’s conclusions
[1]
Popov, V L. Contact Mechanics and Friction Physical Principles and Applications. Beijing: Tsinghua University Press; 2019, pp. 1-17.
[8]
Popova E, Popov V L. The Research Works of Coulomb and Amontons and Generalized Laws of Friction. Friction. 2015, 3: 183-190.
. Since the surfaces he studied were not perfectly smooth, he proposed that friction arises from one surface’s asperities sliding over another’s, requiring work to overcome resistance, or from the bending and fracturing of asperities. Amontons introduced the asperity interlocking theory, which aligns closely with modern under-standings of rough surface contact and asperity deformation in tribology.
Coulomb
[8]
Popova E, Popov V L. The Research Works of Coulomb and Amontons and Generalized Laws of Friction. Friction. 2015, 3: 183-190.
, another notable scientist in the study of friction, systematically investigated the effects of various factors on friction using a self-designed apparatus (see Figure2(c)), including material properties, surface lubrication, contact area, and applied load. Coulomb distinguished between static friction and sliding friction and formulated the fundamental laws of friction:
1) Friction force is proportional to the normal pressure acting on the contact surface.
2) Friction force is independent of the nominal contact area.
3) Sliding friction force is independent of sliding velocity.
4) The maximum static friction force is greater than the sliding friction force.
Coulomb’s friction laws further clarified the effects of contact area and sliding velocity on friction. Given the two fundamental conditions for friction—contact and normal load—his work emphasized the strong coupling between friction and contact mechanics.
Figure 2. (a) Quantitative friction measurement instrument by Leonardo da Vinci; (b) Amontons’ friction experimental setup; (c) Coulomb’s experimental setup for slide friction; (d) Desagulies’s experi-mental setup.
2.2. Molecular Adhesion Theory
In contrast, the British scientist Desaguliers
[6]
Dowson, D. History of Tribology. London, Professional Engineering Publishing; 1998, pp. 7-16.
[6]
, in his book Course of Experimental Philosophy, challenged the asperity interlocking theory through his lead sphere separation experiment. He proposed that friction originates from intermolecular forces between surfaces, suggesting that smoother surfaces should exhibit higher friction based on his experiments by homemade setup (see Figure 2(d)), an idea later found to correspond to adhesion effects in friction
[9]
Tomlinson G A. A molecular theory of friction. The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science. 1929, 7(46): 905-939.
Mcfarlane J S, Tabor D. Adhesion of Solids and the Effect of Surface Films. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences. 1950, 202(1069): 224-243.
Through the experimental studies of friction phenomena and the formulation of friction laws by Leonardo da Vinci, Amontons, Coulomb, Desaguliers, and others, it has become clear that friction and contact are strongly coupled. Based on the issues in contact mechanics, two theories can be distinguished: one is the asperity theory, which is based on the deformation and fracturing of micro-asperities, and the other is the molecular theory, which is based on the molecular forces between the contact surfaces. These two theories laid the foundation for the development of modern contact mechanics.
3. Single Asperity Contact
3.1. Hertz Contact
Following the asperity theory of friction, the contact analysis of a single asperity can be simplified into an infinitesimal sphere-on-flat contact model. In 1881, Hertz
[11]
Renger A. Johnson, KL, Contact Mechanics. Cambridge, Cambridge University Press; 1985: 84-104.
[11]
proposed the first contact model, which assumes that the contact surfaces are smooth, continuous, and frictionless, simplifying the problem into a quadratic surface contact. Additional assumptions include small deformations in the contact area, meaning the asperities behave as elastic bodies, isotropic material properties, and negligible adhesion forces within the contact region. These assumptions indicate that the Hertz contact model provides a fundamental explanation for the asperity-based theory of friction. Based on Hertz’s model, the relationships among load (P), contact radius (a), contact displacement (δ), and pressure distribution can be derived as follows:
(1)
(2)
(3)
In this model, E* represents the composite elastic modulus, , and R is the equivalent radius of curvature of the surfaces .
The Hertz pressure distribution within the contact circle follows the formula:
Where r represents the distance from any point inside the contact circle to the center of the contact area. In addition to the pressure distribution, there is also shear stress, with the maximum shear stress occurring at a depth of 0.48a from the surface, and its value is 0.31p0.
3.2. JKR Contact
The real contact situation in the contact area is quite complex, especially when the atomic or molecular distances between the contact surfaces are extremely small, even to the point of electronic cloud overlap, which results in strong repulsive forces. Currently, the Lennard-Jones potential function is commonly used to approximate these interactions (see Table 1)
[12]
Schwarz U D. A generalized analytical model for the elastic deformation of an adhesive contact between a sphere and a flat surface. Journal of Colloid and Interface Science. 2003, 261(1): 99-106.
. Since the Hertz contact theory does not take the contribution of adhesion forces into account, particularly at the micro-nano scale where scale effects are especially pronounced, the Hertz model becomes inadequate.
Typically, adhesion forces are considered as a combination of electrostatic forces, van der Waals forces, capillary forces, and chemical forces. In 1971, Johnson, Kendall, and Robert
[14]
Johnson K L, Kendall K, Roberts A D. Surface Energy and the Contact of Elastic Solids. Proceedings of the Royal Society of London. A. Mathematical and Physical sciences. 1971, 324(1558): 301-313.
proposed the JKR contact model, which takes the contribution of adhesion forces into account. This model assumes that the adhesion force acts within the contact area and is applicable to contacts with relatively low hardness, larger adhesion forces, and larger tip radii.
(4)
(5)
(6)
(7)
Where , W12 is the adhesion work between the two surfaces, and the maximum adhesion force is .
3.3. DMT Contact
In 1975, Derjaguin, Muller, and Toporov
[15]
Derjaguin B V, Muller V M, Toporov Y P. Effect of Contact Deformations on the Adhesion of Particles. Journal of Colloid and Interface Science. 1975, 53(2): 314-326.
theoretically derived the relationship between contact radius, load, and displacement, known as the DMT model. This model assumes that the adhesive force exists at the periphery of the contact area and is applicable to hard contact situations with weak adhesion and small tip radii. The JKR and DMT models share the same assumptions: the deformation is linearly elastic, the contact size is relatively small compared to the tip radius, and the contact shape is symmetrical when there is no lateral force.
(8)
(9)
(10)
3.4. MD Contact
In 1992, Maugist and Muller
[16]
Maugis D. Adhesion of Spheres: the JKR-DMT Transition Using A Dugdale Model. Journal of Colloid and Interface Science. 1992, 150(1): 243-269.
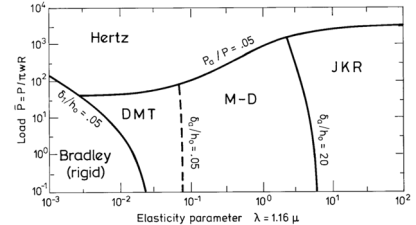
, along with others, unified the JKR and DMT models and provided a dimensionless normalization formula. By comparing the different degrees of approximation of inter-molecular interaction potentials in various models (see Table 1), Johnson and Greenwood classified the applicable range of each model (see Figure 3)
[17]
Johnson K L, Greenwood J A. An Adhesion Map for the Contact of Elastic Spheres. Journal of Colloid and Interface Science. 1997, 192(2): 326-333.
Carpick R W, Ogletree D F, Salmeron M. A General Equation for Fitting Contact Area and Friction vs Load Measurements. Journal of Colloid and Interface Science. 1999, 211(2): 395-400.
and others proposed a general equation to fit the contact area and friction force as a function of load.
Table 1. Comparison of Hertz, JKR, DMT and MD models.
Model
Assumptions
Limitations
Normalized equation
Hertz
Neglect of surface force
Not applicable to small load under surface force
JKR
Short-range surface force act with contact area
Surface forces present, load may be underestimated, applicable to large λ
DMT
Long-range surface forces act outside contact area
Finite contact geometry may reduce contact area, applicable to small λ
MD
Surface forces act in all regions
Only mathematical parameter solutions, suitable for all λ
Real contact
None
None
*In the table , , the parameters include the equivalence radius , the equivalent elastic modulus , contact radius , normal force , and indentation depth . The formula for real contact is described by an empirical potential energy function
[19]
Bhushan B. Handbook of Micro/Nanotribology. Florida: CRC Press; 1999, pp. 237-255.
The above mainly provides a review of the establishment, assumptions, and applicable scope of the single asperity contact model. While it holds significant practical value for experiments using atomic force microscope probes, it is not applicable to the contact of multi asperities. It is evident that both Hertzian and non-Hertzian models, such as JKR and DMT, offer significant contributions to understanding the fundamental mechanisms of friction and contact. Hertz's model has shown its applicability in the context of small elastic deformations, but it does not fully address the effects of adhesion, especially at the microscale and nanoscale, where surface forces become more significant. The extension of these models by incorporating adhesive forces (as in JKR and DMT models) has demonstrated their importance in understanding contact mechanics.
4. Multi Asperity Contact
4.1. GW Contact
Due to the presence of surface roughness, it is difficult to ensure that the actual con-tact area between two surfaces equals the nominal contact area. The actual contact area is formed by the contact of multi asperities. Assume a simple model of a rough surface is composed of an array of single asperities with a value of N, with each rough surface having the same curvature radius and height. The total force P acting on the surface is equivalent to the sum of the forces on the same asperities, and the total real contact area is the sum of the individual contact areas. The force on each asperity could be calculated using Hertz contact theory, and thus the following relationship holds:
(11)
(12)
(13)
The simple model of rough surfaces described above represents contact under special conditions. In elastic deformation, the real contact area is proportional to the two-thirds power of the load, which contradicts experimental results and friction laws. For actual surfaces, the roughness is random. Greenwood and Williamson proposed the simplest method for modeling irregular surfaces, known as the GW model
[1]
Popov, V L. Contact Mechanics and Friction Physical Principles and Applications. Beijing: Tsinghua University Press; 2019, pp. 1-17.
[20]
Bhushan, Ge S R. Introduction to Tribology. Beijing: China Machine Press; 2007, 348-356.
[21]
Greenwood J A, Williamson J B P. Contact of Nominally Flat Surfaces. Proceedings of the Royal Society of London. 1966, 295(1442): 300-319.
. The GW model makes the following assumptions: all asperities on the surface have the same curvature radius and spherical tops; the height of the asperities is random; the distribution of the peak heights follows a Gaussian distribution. Based on these assumptions, a mathematical statistical model could be employed to describe the surface roughness.
The height distribution of asperities is:
(14)
where l is the root-mean-square (RMS) of the height distribution, and it represents the surface roughness.
The above completes the contact between the elastic body and the rigid plane for statistical roughness. Next, we need to consider interaction of the elastic bodies during the contact process. Assuming the elastic interaction between asperities, all asperities with height are in contact with the rigid plane. The indentation depth for an asperity with height z is . According to Hertz's theory, for a single contact, the relationship is . The contact area of single asperity is:
(15)
The force on single asperity is:
(16)
By summing (integrating) over all the contacting asperities, the total number, total contact area, and total normal contact force FN can be obtained. Integrating over the height from to infinity:
(17)
(18)
(19)
The above are the main formulas of the GM contact model, and the details of the derivation are not repeated here. For more information, refer to relevant papers and books
[22]
Carbone G. A slightly corrected Greenwood and Williamson model predicts asymptotic linearity between contact area and load. Journal of the Mechanics and Physics of Solids. 2009, 57(7): 1093-1102.
Putignano C, Afferrante L, Carbone G, et al. A new efficient numerical method for contact mechanics of rough surfaces. International Journal of Solids and Structures. 2012, 49(2): 338-343.
. The GM contact model only considers elastic deformation; however, plastic deformation may occur in real condition, and a plasticity index is usually introduced for calculations.
4.2 Persson Contact
Since the GW contact theory does not account for the adhesive effects of multi asperities, Persson, based on the GW contact theory, proposed the Persson contact theory, which considers the effects of adhesion and the scale dependence of the contact area
[24]
Persson B N J. Theory of rubber friction and contact mechanics. The Journal of Chemical Physics. 2001, 115(8): 3840-3861.
. The concept of Persson contact is similar to the GW contact theory, but the statistical description of roughness and the elastic contact theory used in Persson's model differ from those in the GW theory. Persson employs a power spectral density to describe surface roughness:
(20)
The random rough surface height function is given by: , where q is the wave vector.
Persson contact theory is based on continuous linear elasticity theory, and the relationship between the real contact area and pressure is:
(21)
Where the A0 is the Nominal contact area.
The statistical characteristics of surface roughness were considered in the Persson contact theory, which is more representative of actual surfaces. It can address contact problems from micro to macro scales and provides an in-depth theoretical framework for friction, adhesion, and contact behavior. However, the theoretical calculations are relatively complex, and the specific derivation process can be found in other works
[25]
Persson B N J, Albohr O, Tartaglino U, et al. On the nature of surface roughness with application to contact mechanics, sealing, rubberfriction and adhesion. Journal of physics: Condensed matter. 2004, 17(1): R1.
Yang C, Persson B N J, Israelachvili J, et al. Contact mechanics with adhesion: interfacial separation and contact area. Europhysics Letters, 2008, 84(4): 46004.
Whether it is the GW model or the Persson model, both fundamentally involve first statistically characterizing surface roughness, then solving the problem by combining elastic contact theory. By progressively incorporating factors like adhesion and velocity into the study of contact behavior, they solve clearly defined mathematical problems in continuum mechanics, each offering practical significance.
The GW model, developed by Greenwood and Williamson, has been particularly useful in characterizing random rough surfaces, and the introduction of the Persson model has provided a more comprehensive understanding of contact behavior, considering surface roughness and adhesion at multi scales. Additionally, the statistical nature of rough surfaces has been quantified through the power spectral density function in the Persson model, providing a more precise framework for analyzing real-world contact problems. These developments have led to a better understanding of how friction, adhesion, and contact area evolve in real world materials and contact conditions, especially in the presence of both elastic and plastic deformations.
5. Conclusions and Future Prospects
This review has summarized key advancements in the theoretical understanding of contact mechanics and friction. From the Hertz contact model to more modern approaches, including the JKR, DMT, GW, and Persson models, it is clear that the development of contact theories has made significant strides toward bridging the gap between idealized models and real-world applications. However, challenges remain, particularly in the areas of scaling effects, adhesive interactions, and the transition from elastic to plastic deformation in contact mechanics.
The contact theories mentioned above are all based on elastoplastic mechanics, while inelastic materials (rubber) are widely used in engineering. Research on the contact, deformation, and aging of rubber seals in engineering lubrication is also noteworthy. For contact theories related to rubber contact, please refer to Meng's relevant works
[28]
Meng C. Fundamental equations of contact mechanics for fractal solid surfaces. Acta Mechanica, 2024, 235(4): 1877-1885.
Meng C. Leakage rate estimation of mechanical seals based on fractal contact surface analysis and experimental validation. Industrial Lubrication and Tribology, 2025, 77(8): 1350-1359.
However, challenges remain, particularly in the areas of scaling effects, adhesive interactions, and the transition from elastic to plastic deformation in contact mechanics. With the continuous advancement of computer technology, rapid development of data collection and storage, supercomputers, and more, artificial intelligence (AI) has rapidly penetrated various industries
[31]
Hunt E B. Artificial intelligence. New York: Academic Press; 2014, pp. 3-17.
[31]
. Its essence mainly involves statis-tics, computation, recognition, and comparison
[32]
Das S, Dey A, Pal A, et al. Applications of artificial intelligence in machine learning: review and prospect. International Journal of Computer Applications. 2015, 115(9), 31-41.
Sun Y, He K, Zhang Z N. Multi-source Information Fitting Regression Integrated Model of Coefficient of Friction. Journal of Tsinghua University (Science and Technology). 2022, 62(12): 1980-1988.
. In contact theory, the portion that involves statistical modeling and solutions might be deeply integrated with AI to obtain optimal solutions that are closer to the actual contact state. A collaboration between AI, experimentation and contact theory could provide a strategy (see Figure 4) for future challenges to the tribology community.
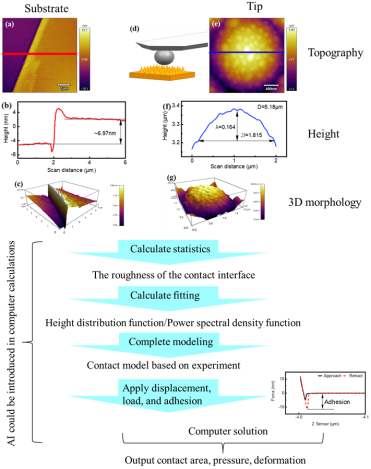
Figure 4. Process diagram for contact analysis of two rough surfaces.
Figure 4 shows a flowchart of solving contact problems by combining modern characterization techniques and AI. Since the initial data on roughness in the GW and Persson theories are sensitive, using the actual roughness of the two contacting surfaces to obtain statistical functions is closer to real conditions. The figure illustrates the use of an atomic force microscope (AFM) to measure the surface morphology of the two contacting surfaces and obtain their roughness parameters. Images (a-c) show the morphology, height of profile line, and 3D schematic of the substrate sur-face sample
[34]
Yu K, Peng Y, Lang H, et al. Material transfer mechanism for fabrication of superlubricity interface by reciprocating rubbing on graphite under high contact stress. Carbon. 2022, 188: 420-430.
. The statistical calculation portion can leverage AI’s powerful computational capabilities to assist in modeling and solving. When considering the effects of adhesion, displacement, and load, the adhesion force data obtained from AFM measurements are incorporated into the solution process, striving to optimize the solution by incorporating more real data, outputting the contact area, pressure distribution, and deformation under the specific experimental conditions.
Abbreviations
JKR contact
Johnson, Kendall, and Robert contact
DMT contact
Derjaguin, Muller, and Toporov contact
MD contact
Maugist and Muller contact
GW contact
Greenwood and Williamson contact
AFM
Atomic Force Microscopy
3D
Three-Dimensional
Acknowledgments
This section serves to recognize contributions that do not meet authorship criteria, including technical assistance, donations, or organizational aid. Individuals or organizations should be acknowledged with their full names. The acknowledgments should be placed after the conclusion and before the references section in the manuscript.
Author Contributions
Kang Yu is the sole author. The author read and approved the final manuscript.
Funding
This work is supported by Foundation of Zhejiang A&F University (Grant No. 2023LFR097) and Overseas Study Scholarship of Zhejiang A&F University.
Conflicts of Interest
The author declares no conflicts of interest.
References
[1]
Popov, V L. Contact Mechanics and Friction Physical Principles and Applications. Beijing: Tsinghua University Press; 2019, pp. 1-17.
[2]
Zheng Q, Ouyang W, Ma M, et al. Superlubricity: the world of ‘zero’ friction, Science & Technology Review. 2016, 34(5), 12-26.
Mcfarlane J S, Tabor D. Adhesion of Solids and the Effect of Surface Films. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences. 1950, 202(1069): 224-243.
Renger A. Johnson, KL, Contact Mechanics. Cambridge, Cambridge University Press; 1985: 84-104.
[12]
Schwarz U D. A generalized analytical model for the elastic deformation of an adhesive contact between a sphere and a flat surface. Journal of Colloid and Interface Science. 2003, 261(1): 99-106.
Johnson K L, Kendall K, Roberts A D. Surface Energy and the Contact of Elastic Solids. Proceedings of the Royal Society of London. A. Mathematical and Physical sciences. 1971, 324(1558): 301-313.
Derjaguin B V, Muller V M, Toporov Y P. Effect of Contact Deformations on the Adhesion of Particles. Journal of Colloid and Interface Science. 1975, 53(2): 314-326.
Carpick R W, Ogletree D F, Salmeron M. A General Equation for Fitting Contact Area and Friction vs Load Measurements. Journal of Colloid and Interface Science. 1999, 211(2): 395-400.
Carbone G. A slightly corrected Greenwood and Williamson model predicts asymptotic linearity between contact area and load. Journal of the Mechanics and Physics of Solids. 2009, 57(7): 1093-1102.
Putignano C, Afferrante L, Carbone G, et al. A new efficient numerical method for contact mechanics of rough surfaces. International Journal of Solids and Structures. 2012, 49(2): 338-343.
Persson B N J, Albohr O, Tartaglino U, et al. On the nature of surface roughness with application to contact mechanics, sealing, rubberfriction and adhesion. Journal of physics: Condensed matter. 2004, 17(1): R1.
Yang C, Persson B N J, Israelachvili J, et al. Contact mechanics with adhesion: interfacial separation and contact area. Europhysics Letters, 2008, 84(4): 46004.
Meng C. Leakage rate estimation of mechanical seals based on fractal contact surface analysis and experimental validation. Industrial Lubrication and Tribology, 2025, 77(8): 1350-1359.
Hunt E B. Artificial intelligence. New York: Academic Press; 2014, pp. 3-17.
[32]
Das S, Dey A, Pal A, et al. Applications of artificial intelligence in machine learning: review and prospect. International Journal of Computer Applications. 2015, 115(9), 31-41.
Sun Y, He K, Zhang Z N. Multi-source Information Fitting Regression Integrated Model of Coefficient of Friction. Journal of Tsinghua University (Science and Technology). 2022, 62(12): 1980-1988.
Yu K, Peng Y, Lang H, et al. Material transfer mechanism for fabrication of superlubricity interface by reciprocating rubbing on graphite under high contact stress. Carbon. 2022, 188: 420-430.
Yu, K. (2026). Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity. American Journal of Mechanics and Applications, 13(1), 1-9. https://doi.org/10.11648/j.ajma.20261301.11
Yu, K. Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity. Am. J. Mech. Appl.2026, 13(1), 1-9. doi: 10.11648/j.ajma.20261301.11
@article{10.11648/j.ajma.20261301.11,
author = {Kang Yu},
title = {Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity},
journal = {American Journal of Mechanics and Applications},
volume = {13},
number = {1},
pages = {1-9},
doi = {10.11648/j.ajma.20261301.11},
url = {https://doi.org/10.11648/j.ajma.20261301.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajma.20261301.11},
abstract = {Friction is a ubiquitous physical phenomenon in nature and daily life. The demand for energy conservation and green development in industrial development has led to increasing attention being paid to tribology research. Despite significant achievements in tribology, many friction problems remain unsolved, particularly the lack of a unified friction theory applicable to all friction issues. The fundamental conditions for occurrence of friction are contact and relative motion between two surfaces, so the advancement of contact theories has significantly contributed to the development of tribology. Not only the models of contact theory across different scales in the past development of tribology were reviewed in this paper, also the assumptions and applicability limitations of each model were summarized and compared. The limitations of theoretical calculations of friction-contact research have been concerned. Now the study of contact mechanics and tribology is facing new opportunities for further progress under the era of the emergence of the big data and artificial intelligence based on sufficient data and computing power. The preliminary prospect on the research of tribology has been carried out. A novel research strategy that combines artificial intelligence, experimentation, and contact theory was proposed to investigate the contact problem in tribology field. This strategy may also be online collaborative research between different research groups all over the world.},
year = {2026}
}
TY - JOUR
T1 - Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity
AU - Kang Yu
Y1 - 2026/01/29
PY - 2026
N1 - https://doi.org/10.11648/j.ajma.20261301.11
DO - 10.11648/j.ajma.20261301.11
T2 - American Journal of Mechanics and Applications
JF - American Journal of Mechanics and Applications
JO - American Journal of Mechanics and Applications
SP - 1
EP - 9
PB - Science Publishing Group
SN - 2376-6131
UR - https://doi.org/10.11648/j.ajma.20261301.11
AB - Friction is a ubiquitous physical phenomenon in nature and daily life. The demand for energy conservation and green development in industrial development has led to increasing attention being paid to tribology research. Despite significant achievements in tribology, many friction problems remain unsolved, particularly the lack of a unified friction theory applicable to all friction issues. The fundamental conditions for occurrence of friction are contact and relative motion between two surfaces, so the advancement of contact theories has significantly contributed to the development of tribology. Not only the models of contact theory across different scales in the past development of tribology were reviewed in this paper, also the assumptions and applicability limitations of each model were summarized and compared. The limitations of theoretical calculations of friction-contact research have been concerned. Now the study of contact mechanics and tribology is facing new opportunities for further progress under the era of the emergence of the big data and artificial intelligence based on sufficient data and computing power. The preliminary prospect on the research of tribology has been carried out. A novel research strategy that combines artificial intelligence, experimentation, and contact theory was proposed to investigate the contact problem in tribology field. This strategy may also be online collaborative research between different research groups all over the world.
VL - 13
IS - 1
ER -
College of Optical, Mechanical and Electrical Engineering, Zhejiang A&F University, Hangzhou, China
Biography:
Kang Yu is a lecturer at Zhejiang A&F University, College of Optical, Mechanical and Electrical Engineering. He completed his PhD in Mechanical Engineering from Donghua University in 2022, and his Master of Mechanical Engineering from Jiangsu Normal University in 2016.
Research Fields:
Nanotribology, Superlubricity, Contact mechanics and tribology, Lubrication and friction, Precision manufacturing.
Yu, K. (2026). Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity. American Journal of Mechanics and Applications, 13(1), 1-9. https://doi.org/10.11648/j.ajma.20261301.11
Yu, K. Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity. Am. J. Mech. Appl.2026, 13(1), 1-9. doi: 10.11648/j.ajma.20261301.11
@article{10.11648/j.ajma.20261301.11,
author = {Kang Yu},
title = {Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity},
journal = {American Journal of Mechanics and Applications},
volume = {13},
number = {1},
pages = {1-9},
doi = {10.11648/j.ajma.20261301.11},
url = {https://doi.org/10.11648/j.ajma.20261301.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajma.20261301.11},
abstract = {Friction is a ubiquitous physical phenomenon in nature and daily life. The demand for energy conservation and green development in industrial development has led to increasing attention being paid to tribology research. Despite significant achievements in tribology, many friction problems remain unsolved, particularly the lack of a unified friction theory applicable to all friction issues. The fundamental conditions for occurrence of friction are contact and relative motion between two surfaces, so the advancement of contact theories has significantly contributed to the development of tribology. Not only the models of contact theory across different scales in the past development of tribology were reviewed in this paper, also the assumptions and applicability limitations of each model were summarized and compared. The limitations of theoretical calculations of friction-contact research have been concerned. Now the study of contact mechanics and tribology is facing new opportunities for further progress under the era of the emergence of the big data and artificial intelligence based on sufficient data and computing power. The preliminary prospect on the research of tribology has been carried out. A novel research strategy that combines artificial intelligence, experimentation, and contact theory was proposed to investigate the contact problem in tribology field. This strategy may also be online collaborative research between different research groups all over the world.},
year = {2026}
}
TY - JOUR
T1 - Progress on Friction-contact Mechanics Research: From Single-to Multi-Asperity
AU - Kang Yu
Y1 - 2026/01/29
PY - 2026
N1 - https://doi.org/10.11648/j.ajma.20261301.11
DO - 10.11648/j.ajma.20261301.11
T2 - American Journal of Mechanics and Applications
JF - American Journal of Mechanics and Applications
JO - American Journal of Mechanics and Applications
SP - 1
EP - 9
PB - Science Publishing Group
SN - 2376-6131
UR - https://doi.org/10.11648/j.ajma.20261301.11
AB - Friction is a ubiquitous physical phenomenon in nature and daily life. The demand for energy conservation and green development in industrial development has led to increasing attention being paid to tribology research. Despite significant achievements in tribology, many friction problems remain unsolved, particularly the lack of a unified friction theory applicable to all friction issues. The fundamental conditions for occurrence of friction are contact and relative motion between two surfaces, so the advancement of contact theories has significantly contributed to the development of tribology. Not only the models of contact theory across different scales in the past development of tribology were reviewed in this paper, also the assumptions and applicability limitations of each model were summarized and compared. The limitations of theoretical calculations of friction-contact research have been concerned. Now the study of contact mechanics and tribology is facing new opportunities for further progress under the era of the emergence of the big data and artificial intelligence based on sufficient data and computing power. The preliminary prospect on the research of tribology has been carried out. A novel research strategy that combines artificial intelligence, experimentation, and contact theory was proposed to investigate the contact problem in tribology field. This strategy may also be online collaborative research between different research groups all over the world.
VL - 13
IS - 1
ER -
 (1)
(1)  (2)
(2)  (3)
(3)  , and R is the equivalent radius of curvature of the surfaces
, and R is the equivalent radius of curvature of the surfaces  .
. 
 (4)
(4)  (5)
(5)  (6)
(6)  (7)
(7)  , W12 is the adhesion work between the two surfaces, and the maximum adhesion force is
, W12 is the adhesion work between the two surfaces, and the maximum adhesion force is  .
.  (8)
(8)  (9)
(9)  (10)
(10)  ,
,  , the parameters include the equivalence radius
, the parameters include the equivalence radius  , the equivalent elastic modulus
, the equivalent elastic modulus  , contact radius
, contact radius  , normal force
, normal force  , and indentation depth
, and indentation depth  . The formula for real contact is described by an empirical potential energy function
. The formula for real contact is described by an empirical potential energy function  (11)
(11)  (12)
(12)  (13)
(13)  (14)
(14)  are in contact with the rigid plane. The indentation depth for an asperity with height z is
are in contact with the rigid plane. The indentation depth for an asperity with height z is  . According to Hertz's theory, for a single contact, the relationship is
. According to Hertz's theory, for a single contact, the relationship is  . The contact area of single asperity is:
. The contact area of single asperity is:  (15)
(15)  (16)
(16)  to infinity:
to infinity:  (17)
(17)  (18)
(18)  (19)
(19)  (20)
(20)  , where q is the wave vector.
, where q is the wave vector.  (21)
(21)